I just completed a degree in Aerospace Engineering at Ryerson University and I'm ready to work! I bring to the table plenty of knowlege about the spacecraft environment, aviation, and software development. I'm a self-taught
programmer with close to 10 years of experience across various languages and platforms.
I have worked in research settings, at a startup, and even from home, considering the challenges of the pandemic. Besides just software
development and filling out spreadsheets, I can also perform mechanical design, analysis, and plenty of hands-on work. Check the Skills tab below for the complete list.
For the longest time, I've wanted to work on projects that really push the boundaries in space. It is my hope that I get to work on hardware that goes into orbit and beyond alongside a dedicated team who is as passionate about space as I am.
As a dual Canadian and EU citizen, I am able to work within Canada and the European Union. I am located in Toronto, Ontario, but I am able to relocate if necessary. I am fluent in English but I can also speak basic French and Portugese. For the latter two languages, I can study to fluency within months if required.
I am a self-taught programmer. I started in 7th grade by writing a C++ console program that asks for your weight on earth and converts it to weights on other planets. Since then, I have learned to use many languages, libraries, and platforms.
This is a small list of common software tools that I'm experienced in.
When it comes to mechanical design, this is what I can do.
Here's what I can do on the shop floor.
I was hired as SpaceRyde's first intern. As part of working towards the company's goal of launching orbital rockets from high-altitude balloons, I had the opportunity to work on the avionics package for the company's airborn rocket carrier. Some of my responsibilities included:
Shown below is a test flight of the rocket carrier with the assistance of National Research Council Canada. This test flight occured after the end of my internship.
A client hired me to develop software for a Raspberry Pi computer that would control a DSLR camera to take photos for a timelapse. The project had the following requirements:
Performing the first three tasks is relatively straightforward. However, 13 months is a long time in which uncontrollable circumstances like power and internet failures can occur. To ensure reliablility, the software was written in such a way that it can continue where it left off after a sudden power loss. Additionally, if there is a failure of the internet or Google API, the software was written so that it can clear the backlog of un-uploaded files when service is restored.
I had the opportunity to spend two summers working at the Ryerson MIMS lab to develop Augmented and Virtual Reality applications in aerospace. Some of the things I did there included:
This was my first paid regular job. I worked in the busy environment that is Toronto Pearson International Airport to ensure that outbound flights were cleared of food and waste from the previous flight and were stocked with fresh catering. Such duties included:
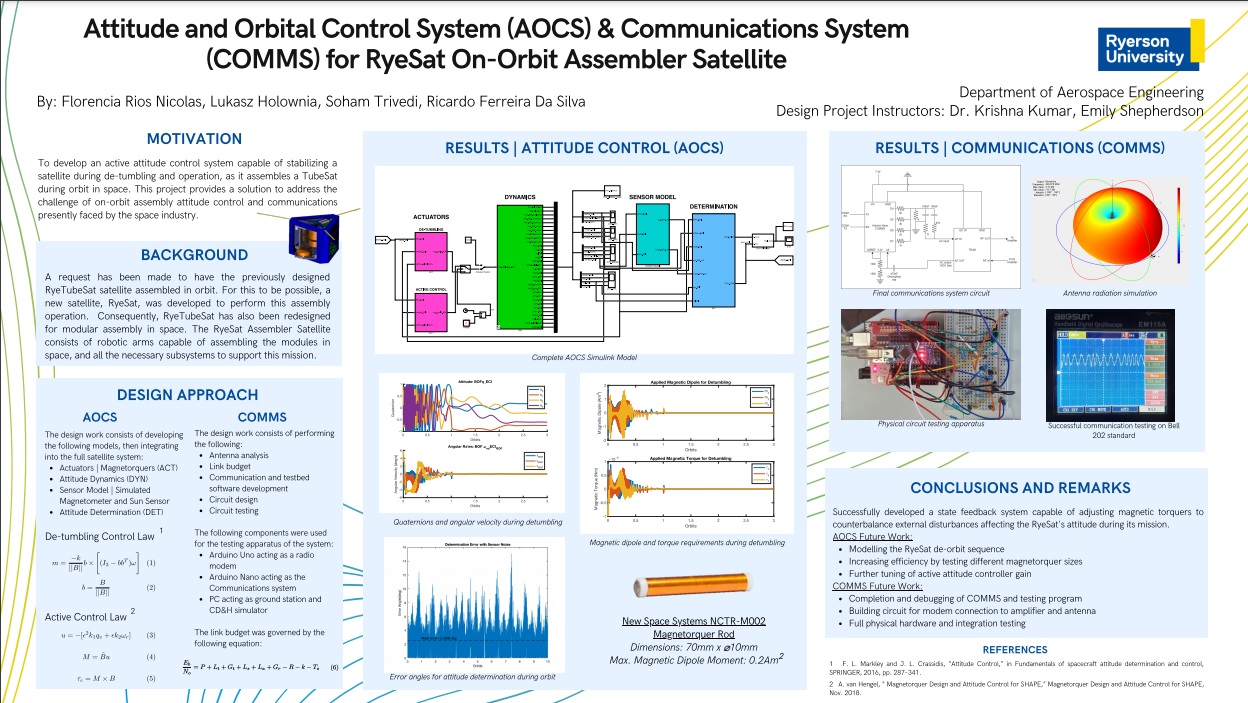
Graduated with winning capstone project for 2021. My group of four students performed:
for a technology demonstrator satellite that would assemble a modular satellite and deploy that. The technology demonstrator was developed with 2 other groups in close communication. My responsibilities in the project were:
Click or tap the image to open the poster as a high resolution PDF
Following my internship with SpaceRyde, I wasn't ready to stop working on rocket-related projects. I joined RPG to apply my software skills in the development of a prototype liquid-fueled rocket for the Launch Canada competition. I worked with the associated hardware lead plus 3 members to develop the software that controls the rocket. This also includes writing the software to wirelessly send commands and monitor it's status. Additionally, part of my role includes developing procedures for safely performing a cold flow and static fire test of the rocket.
I was in charge of the selection, procurement, assembly, and testing of all avionics components for the development of a volume-constrained remote controlled aircraft that would compete in the Micro Class of the SAE Aero Design Competition. I got to experience the competition first-hand by flying with the team to Van Nuys, California for the west coast event.
For the 2015 and 2016 seasons, I had the opportunity to develop software for the team's robots that competed in the First Robotics Competition. The software was developed to run on a National Instruments RoboRIO controller. The
code for the 2015 season was written in Python, while the code for the 2016 season was written in Java.
For the 2016 season, I also developed software for tracking a retroreflective target for the robot to score points in the
autonomous portion of the competition game. This program applied concepts that were new for me at the time including machine vision and multithreading. I still consider it one of my greatest programming achievements, despite it not
being implemented on the robot.
The software is available on GitHub.
I joined the Air Cadet program with the goal of attaining my Private Pilot License via their scholarship. In my time there, I grew considerably, having learned to overcome my shyness, survive outdoors, speak in front of crowds, and teach classes (and love it). I was able to achieve my initial goal along with getting my Glider Pilot License, going to the United Kingdom for the International Air Cadet Exchange, and achieving the highest rank in the program.

Nixie tube clocks have always appealed to me. I really wanted to make one, but I also wanted to avoid the hassle of keeping correct time and setting the clock whenever power was lost. I was inspired by this project to develop a clock that would recieve accurate time from a radio broadcast. Because the radio portion of that project uses a chip that is specifically tuned to a radio broadcast in Europe, I set out to develop my own solution that uses a local broadcast. I selected CHU Station, operated by National Research Council Canada. So far, I have acquired and tested the nixie tubes along with the necessary electronics to operate them. I hit a roadblock with the radio component that I have lately been unable to solve due to my university schedule. With school finally over, this project is once again in full swing. I have also opted to replace the original computing solution, two Arduino Nanos, with the recently released Raspberry Pi Pico, being cheaper and more capable.

Back in 2017, I was very interested in recreating a specifc effect that results from missing data in an MP4 video. MP4 is a compressed video format that mostly contains changes between frames, rather than storing every pixel of every frame. If some of that data is missing, you can sometimes get an effect where an old element traverses across newer frames, and I think it looks really cool! The program works by determining "optical flow", or the apparent motion of objects in a video, by dividing video frames into sections and finding the lowest "sums of absolute differences" amongst the same and surrounding sections in the next video frame. The code for it is on GitHub and a demo of my software is shown below.
Since 2017, I have been developing a MIDI Controller for a friend who makes music. A MIDI controller is an interface that allows musicians to easily control digital instruments. This controller is entirely designed by me with input from various musicians. It features a custom printed circuit board (PCB), custom molded buttons, and a laser-cut wood covering. All internal components are Commercial Off The Shelf (COTS) and the controller is powered by a PIC microcontroller. The project has been on hold due to university but is expected to be completed in late 2021.
The Royal Aeronautical Society held a competition for young people to envision how the field of aeronautics would drastically change by 2076. I initially submitted a short paper detailing how the widescale adoption of Augmented Reality (AR) headsets would improve General Aviation by presenting pilots with all the relevant information they need to fly safely. This paper included a gradual adoption process that starts with pre-existing technology. I was selected as a finalist and invited to speak publicly about my paper at the Society headquarters in London, UK. There, I was awarded 2nd place along with a cash prize.
In the span of less than a day, I and a partner were challenged with developing a viable business plan for a company that would use unmanned aerial vehicles (UAVs) to support renewable energy. Our plan was to use UAVs with ground-penetrating radars attached to quickly and autonomously inspect hydroelectric dams for cracks. Our case was that we could sell this proprietary service which would be faster and more thorough than the existing visual inspections that are performed by humans. We figured that big dam users like Ontario Power Generation and Hydro-Quebec would be viable customers for this service. Our case won 1st place in the competition.
My high school, Western Technical and Commercial School, offered this extra distinction with my diploma which shows that I took specific courses relating to manufacturing and robotics. As part of this program, I learned and recieved hand-on experience in metalworking, both in the school's metal shop, and in a course at George Brown College which the school sponsored. Another part of this program was to learn about robotics by programming Arduino controllers, as well as learning IT skills with the Cisco IT Essentials course.
As part of my time with the Royal Canadian Air Cadets, I recieved full scholarships for training to get my Private Pilot and Glider Pilot license. The Glider Pilot course was carried out by the program's own school in Prince Edward County, Ontario. The Private Pilot course was carried out at the Waterloo Wellington Flight Centre in Breslau, Ontario. For the latter course, I recieved the highest score in the Transport Canada written exam out of everyone in my class. That course was carried out over seven weeks, and uniquely, it was extensively filmed for the production of a National Film Board of Canada documentary, As The Crow Flies.
